Hallo! In diesem Beitrag werde ich Schritt für Schritt erklären, wie Sie ein schallempfindliches Panda-Tanzprojekt erstellen können. Dieses Projekt bietet eine unterhaltsame und lehrreiche Robotik-Erfahrung. In unserem Projekt werden wir mit einem Micro:bit V2, einer Keyestudio-Erweiterungsplatine und Servomotoren eine Panda-Figur bauen, die sich je nach Lautstärke bewegt. Mit steigendem Geräuschpegel bewegen sich die Arme des Pandas schneller, während er bei niedrigen Geräuschpegeln vollständig stoppt. Lassen Sie uns nun die Materialien im Detail betrachten.
Benötigte Materialien:
1. Micro:bit V2:
- Der Micro:bit V2 wird im Projekt als Hauptsteuereinheit verwendet. Dieser kleine Computer kann mithilfe seines eingebauten Mikrofons die Umgebungslautstärke erfassen. Außerdem sendet er Befehle an die Servomotoren, sodass sich der Panda bei steigender Lautstärke bewegt.
2. Keyestudio-Erweiterungsplatine:
- Die Keyestudio-Erweiterungsplatine ermöglicht es, mehrere Geräte an den Micro:bit anzuschließen. Wir verwenden diese Platine, um Servomotoren und andere Hardware einfach mit dem Micro:bit zu verbinden. Die Erweiterungsplatine erleichtert die Befestigung der Servomotoren und die korrekte Verbindung zu den richtigen Pins.
3. 2 Servomotoren:
- Diese Motoren sorgen für die Bewegung der Arme. Sie reagieren auf Befehle vom Micro:bit und bewegen die Arme der Panda-Figur auf und ab. Die Motoren werden über die Keyestudio-Erweiterungsplatine gesteuert.
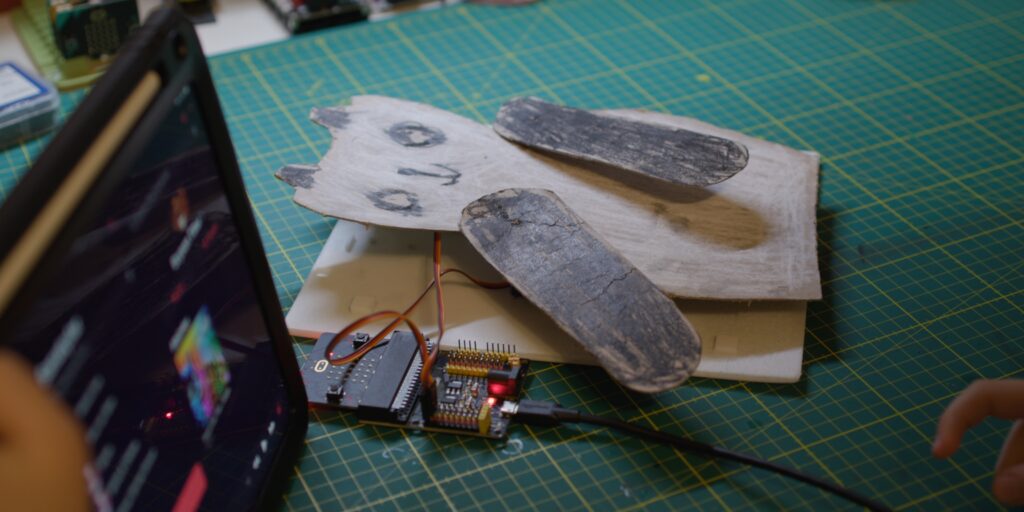
4. Karton und Schere:
- Wir verwenden Karton, um unsere Panda-Figur zu erstellen. Aus dem Karton schneiden wir den Körper, die Arme und andere Teile des Pandas. Mit Schere und Stift formen wir die Figur des Pandas und schneiden Teile aus, die mit den Servomotoren verbunden werden können.
5. Klebstoff:
- Wir benötigen einen starken Klebstoff, um die Panda-Figur zusammenzufügen und die Servomotoren am Karton zu befestigen. Die Servomotoren müssen sicher befestigt werden, damit die Arme und der Körper stabil bleiben.
6. Jumper-Kabel:
- Wir verwenden Jumper-Kabel, um die Servomotoren mit dem Micro:bit zu verbinden. Diese Kabel stellen die Verbindung zwischen der Erweiterungsplatine und den Servomotoren her und sorgen für die korrekte Funktion der Motoren.
Warum haben wir diese Materialien gewählt?
Für dieses Projekt verlassen wir uns auf die Geräuscherkennungsfähigkeit des Micro:bit V2 dank seines eingebauten Mikrofons. Die Keyestudio-Erweiterungsplatine erleichtert mehrere Hardware-Verbindungen und hilft uns, die Servomotoren ordnungsgemäß zu steuern. Eine einfache Panda-Figur aus Karton bietet eine praktische und kreative Projekterfahrung. Die Integration von Servomotoren in diese Figur verleiht dem Projekt eine mechanische Dimension und erzeugt einen echten Tanzeffekt, der sich nach dem Geräuschpegel richtet.
Wie Sie Ihrem Kind dieses Projekt erklären können
Das Interesse Ihres Kindes an Technologie und Programmierung kann mit solchen Projekten viel unterhaltsamer werden. Ich werde Schritt für Schritt erklären, wie Sie das Projekt Tanzender Panda (Schallempfindlich) Ihrem Kind auf einfache und unterhaltsame Weise erklären können.
1. Erklären Sie den Zweck des Projekts
Beginnen Sie damit, Ihrem Kind zu erklären, worum es bei diesem Projekt geht und was es tun wird:
• „Heute werden wir gemeinsam einen Panda bauen, der tanzt, wenn er Musik hört! Der Panda hört auf die Geräusche in der Umgebung und bewegt seine Arme auf und ab, wenn er Musik hört. Der Panda tanzt also zur Musik!“
Diese Erklärung kann Ihrem Kind helfen, das Projekt als Spiel zu betrachten und neugierig daran teilzunehmen.
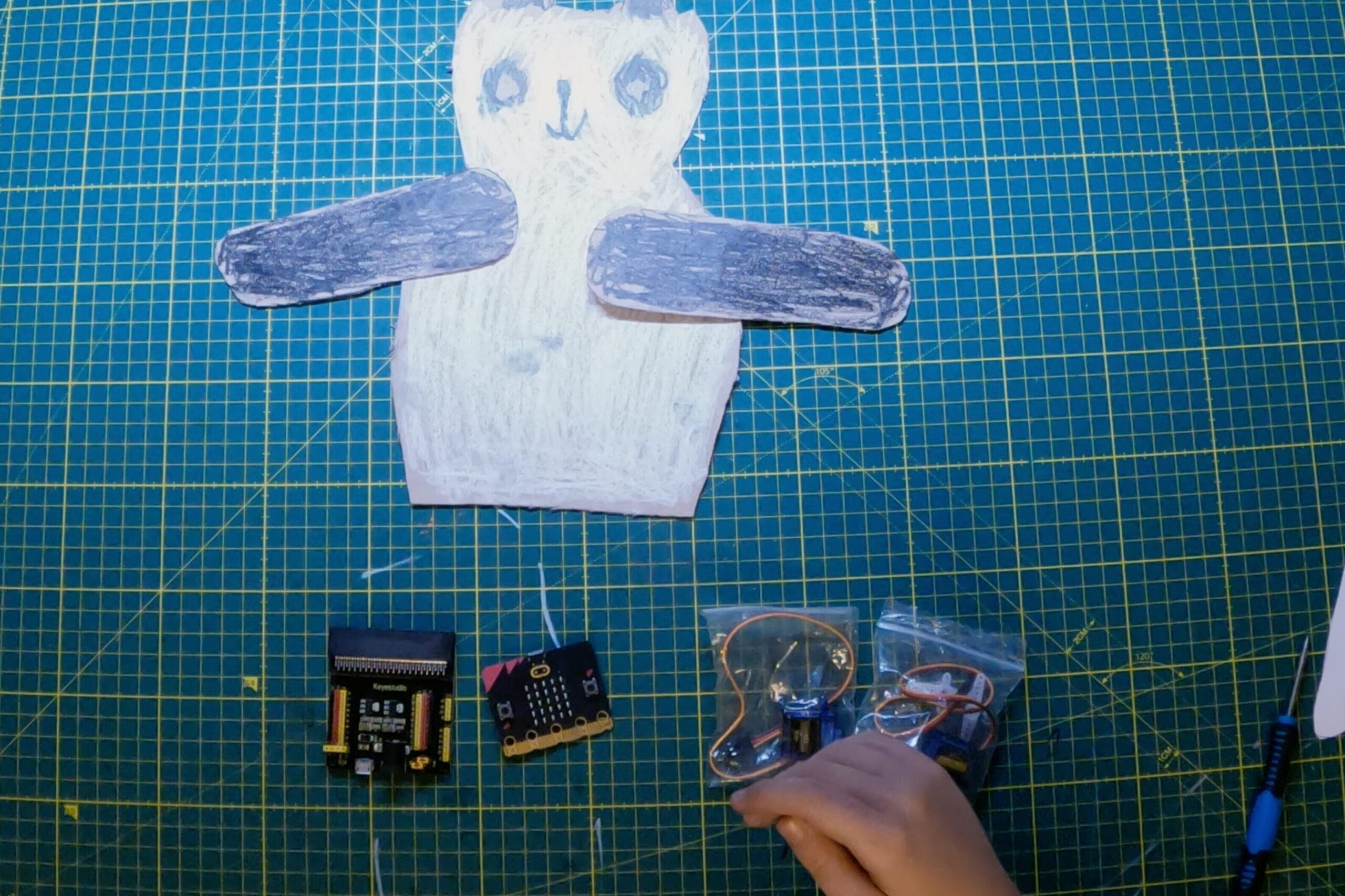
2. Stellen Sie die Materialien vor
Zeigen Sie die Materialien, die Sie für das Projekt verwenden werden, und erklären Sie einfach, wozu sie dienen:
• Micro:bit: „Dieses kleine Gerät ist das Gehirn unseres tanzenden Pandas! Es wird die Musik hören und entscheiden, wie sich die Panda-Arme bewegen sollen.“
• Servomotoren: „Das sind kleine Motoren, die dafür sorgen, dass sich die Panda-Arme auf und ab bewegen.“
• Panda-Figur aus Karton: „Diese Panda-Figur aus Karton wird unser beweglicher Panda. Dank der Motoren können sich seine Arme wirklich bewegen!“
• Mikrofon (im Micro:bit): „Auf dem Micro:bit gibt es ein Mikrofon, das wie unsere Ohren die Musik hören wird, und entsprechend wird der Panda tanzen.“
3. Erklären Sie die Funktionsweise
Erklären Sie in einfacher Sprache, wie das Projekt funktionieren wird, damit Ihr Kind den Prozess versteht:
• „Wenn der Panda Musik hört, bewegen diese kleinen Motoren seine Arme. Wenn die Musik sehr laut ist, tanzt der Panda sehr schnell; wenn die Musik etwas leiser ist, tanzt er langsamer. Wenn es gar keine Geräusche gibt, ruht sich der Panda aus und seine Arme bewegen sich nicht.“
Diese Erklärung hilft Ihrem Kind zu verstehen, wie der Geräuschpegel die Geschwindigkeit der Motoren steuert.
4. Sorgen Sie für eine unterhaltsame Beteiligung
Sie können das Interesse Ihres Kindes wachhalten, indem Sie ihm Fragen stellen, während Sie es in das Projekt einbeziehen:
• „Wie denkst du, wird der Panda tanzen, wenn er Musik hört?“
• „Bist du bereit, mit mir den Panda zum Tanzen zu bringen?“
Sie können die Beteiligung Ihres Kindes fördern, indem Sie ihm in jeder Phase des Projekts kleine Aufgaben geben, wie das Ausschneiden des Pandas aus Karton oder das Platzieren der Servomotoren.
5. Experiment und Beobachtung
Nach Abschluss des Projekts beobachten Sie gemeinsam mit Ihrem Kind, wie die Panda-Figur auf Musik reagiert:
• „Schau, je schneller die Musik wird, desto schneller tanzt auch der Panda!“
• „Was meinst du, warum bewegt sich der Panda nicht, wenn es still ist?“
Dieser Prozess wird die Neugier Ihres Kindes am Projekt fördern und ihm helfen, es besser zu verstehen. Es ist auch eine großartige Gelegenheit, Ihrem Kind beizubringen, wie Geräusche und Technologie zusammenwirken.
Zusammenfassend bietet das Projekt Tanzender Panda Ihrem Kind sowohl ein unterhaltsames als auch ein lehrreiches Erlebnis. Das Projekt Schritt für Schritt mit Ihrem Kind durchzuführen steigert sein Interesse an Technologie und ermöglicht qualitativ hochwertige gemeinsame Zeit!
Projektcode
Der wichtigste Teil unseres Projekts ist der Code, der mit dem Mikrofonsensor des Micro:bit den Umgebungsgeräuschpegel erkennt und entsprechend diesem Pegel die Servomotoren steuert, die die Arme der Panda-Figur bewegen. In diesem Abschnitt werde ich einen einfachen aber effektiven JavaScript-Code teilen, der auf der MakeCode-Plattform geschrieben wurde, und jeden Schritt detailliert erklären.
let sesSeviyesi = 0
let hiz = 500 // Anfangsgeschwindigkeit (in Millisekunden)
// Servomotoren zu Beginn auf 90 Grad Position einstellen
pins.servoWritePin(AnalogPin.P0, 90) // Linker Arm
pins.servoWritePin(AnalogPin.P1, 90) // Rechter Arm
basic.forever(function () {
// Geräuschpegel mit dem Mikrofon erfassen
sesSeviyesi = input.soundLevel()
// Geschwindigkeitseinstellungen je nach Geräuschpegel anpassen
if (sesSeviyesi > 200) {
// Hoher Pegel: sehr schnelle Bewegung
hiz = 100
} else if (sesSeviyesi > 150) {
// Mittlerer Pegel: schnelle Bewegung
hiz = 200
} else if (sesSeviyesi > 100) {
// Niedriger Pegel: mittlere Geschwindigkeit
hiz = 400
} else {
// Bei niedrigem Geräuschpegel Motoren stoppen
pins.servoWritePin(AnalogPin.P0, 90) // Linker Arm Stoppposition
pins.servoWritePin(AnalogPin.P1, 90) // Rechter Arm Stoppposition
basic.pause(100)
return // Bei niedrigem Pegel arbeiten die Motoren nicht
}
// Bewegung der Arme
pins.servoWritePin(AnalogPin.P0, 45) // Linker Arm nach oben
pins.servoWritePin(AnalogPin.P1, 135) // Rechter Arm nach oben
basic.pause(hiz) // Bewegungsgeschwindigkeit
pins.servoWritePin(AnalogPin.P0, 135) // Linker Arm nach unten
pins.servoWritePin(AnalogPin.P1, 45) // Rechter Arm nach unten
basic.pause(hiz) // Bewegungsgeschwindigkeit
})Erklärung des Codes
1. Variablen und Starteinstellungen:
let sesSeviyesi = 0
let hiz = 500 // Anfangsgeschwindigkeit (in Millisekunden)
• sesSeviyesi: Eine Variable, die verwendet wird, um den Umgebungsgeräuschpegel kontinuierlich mit dem Mikrofon zu messen.
• hiz: Die Geschwindigkeitsvariable, die bestimmt, wie schnell sich die Arme durch die Servomotoren bewegen. Initial auf 500 Millisekunden eingestellt (langsame Geschwindigkeit).
2. Servomotoren auf Startposition einstellen:
pins.servoWritePin(AnalogPin.P0, 90) // Linker Arm
pins.servoWritePin(AnalogPin.P1, 90) // Rechter Arm
• Zu Beginn des Projekts werden die Servomotoren auf 90 Grad eingestellt. Dies ist die Ausgangsposition der Arme (mittlere Position).
3. Messung des Geräuschpegels und Geschwindigkeitsanpassung:
sesSeviyesi = input.soundLevel()
• Die Funktion input.soundLevel() verwendet das eingebaute Mikrofon des Micro:bit, um den Umgebungsgeräuschpegel als Wert zwischen 0 und 255 zu messen.
if (sesSeviyesi > 200) {
hiz = 100 // Hoher Pegel: sehr schnelle Bewegung
} else if (sesSeviyesi > 150) {
hiz = 200 // Mittlerer Pegel: schnelle Bewegung
} else if (sesSeviyesi > 100) {
hiz = 400 // Niedriger Pegel: mittlere Geschwindigkeit
} else {
// Bei niedrigem Geräuschpegel Motoren stoppen
pins.servoWritePin(AnalogPin.P0, 90)
pins.servoWritePin(AnalogPin.P1, 90)
basic.pause(100)
return
}
• Wir definieren 3 verschiedene Geschwindigkeitsstufen je nach Geräuschpegel:
• Hoher Pegel (>200): Arme bewegen sich sehr schnell (in Intervallen von 100 ms).
• Mittlerer Pegel (>150): Arme bewegen sich schnell (in Intervallen von 200 ms).
• Niedriger Pegel (>100): Arme bewegen sich mit mittlerer Geschwindigkeit (in Intervallen von 400 ms).
• Wenn der Geräuschpegel sehr niedrig ist (≤100), werden die Arme in die Stoppposition gebracht und die Motoren arbeiten nicht.
4. Bewegung der Arme:
pins.servoWritePin(AnalogPin.P0, 45) // Linker Arm nach oben
pins.servoWritePin(AnalogPin.P1, 135) // Rechter Arm nach oben
basic.pause(hiz) // Bewegungsgeschwindigkeit
pins.servoWritePin(AnalogPin.P0, 135) // Linker Arm nach unten
pins.servoWritePin(AnalogPin.P1, 45) // Rechter Arm nach unten
basic.pause(hiz) // Bewegungsgeschwindigkeit
• Die Arme bewegen sich entsprechend dem Geräuschpegel mit unterschiedlicher Geschwindigkeit auf und ab. Für die Aufwärtsbewegung werden die Servomotoren auf 45 und 135 Grad eingestellt. Für die Abwärtsbewegung werden diese Winkel umgekehrt.
Funktionslogik des Codes
Dieser Code sorgt dafür, dass sich die Arme bei hohem Geräuschpegel schneller bewegen, bei mittlerem Pegel langsamer und bei niedrigem Pegel stillstehen. Der vom Mikrofon erkannte Geräuschpegel steuert dynamisch die Geschwindigkeit der Servomotoren. Dadurch reagiert die Panda-Figur auf Musik oder Geräusche in der Umgebung und tanzt rhythmisch.
Die Struktur des Codes ist recht flexibel und kann in verschiedenen Projekten verwendet werden, indem Parameter wie Geschwindigkeit, Geräuschschwelle und Bewegungswinkel angepasst werden.

